
Item No.: ADF-I-14-100 Installation easyCompact and simple design Outer diameter:75mmWeight:0.58KgMa...
More
Selling Units: Single itemSingle package size: 29X21X13 cmPackage Type: One Set of Harmonic Drive in...
More
Item No.: ADHD-14/17/20-III Brand Name: Arcsec Drive Place of Origin: zhejiang, China ADHD series' f...
More
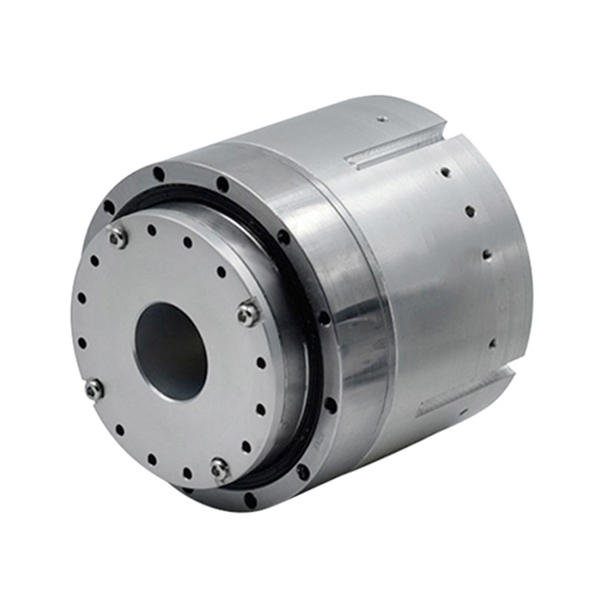
Item number: ADH-I-14-100 Outer diameter:70mmWeight:0.39KgMax.Torque: 62.1NmRated Torque: 9NmOptiona...
More
Item No.: ADH-14/17/20/25/32/40-III hollow shaft harmonic drive popular used on CNC machine, industr...
More
Item No.: ADH-14/17/20/25/32-IV ADH-IV:A combination product with shaft, which is easy to operateADH...
More
Size:14,17,20,25,32 Item No.: ADH-14/17/20/25/32-VADH-V:A simple combination product, the shaft size...
More
Item No.: ADSD-14/17-I Brand Name:Arcsec DriveMaterial: Iron, Stainless steelPlace of Origin:zhejian...
More
Item number: ADS-I-14-100 Outer diameter:73mm Weight:0.51Kg Max.Torque: 62.1Nm Rated Torqu...
More
Color: SilverType:RV SeriesPlace of Origin:zhejiang, ChinaBrand Name:Arcsec DriveApplicable Industri...
More
Item No.: PL01 planetary reducer used on robot arm cnc machine rotary table Output Torque: 48-160Inp...
More
Item No.: PLF01 Place of Origin: Zhejiang, ChinaBrand Name: Arcsec Drive Net Weight: 7.4 KG-9.8KGNo...
MoreCopyright © Zhejiang Qiyue Mechanical Technology Co., ltd. Rights Reserved.
 China Harmonic Drive Gears Manufacturers
China Harmonic Drive Gears Manufacturers