
Brand Name:Arcsec Drive
Place of Origin:zhejiang, China
product name :ROBOT ARM
Material: Iron, Stainless steel
Application:Industry area
How To Order
Browse Products:Send inquiry to sale with drawing order technical detailes.
Check and Recheck: Confirm model; reduction ratio;type and price.
Confirm Order:Arcsec will provide you proformma invoice to you.You sign back to confirm order.
Payment:Arcsec payments method avaliable(TT ; LC at sight).
| Payload | 20 kg | |
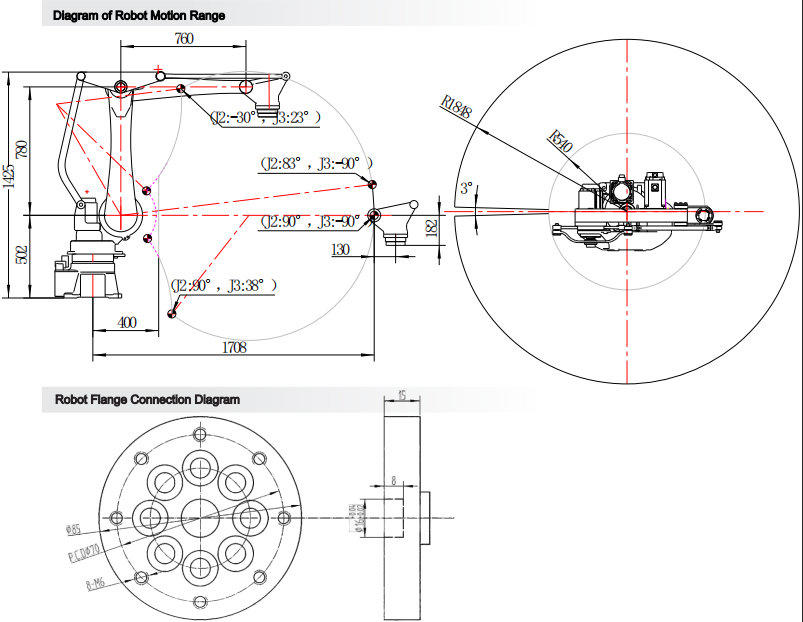
| Reach | 1850 mm | |
| Structure | Articulated | |
| Number of axes | 4 | |
| Repeatability | 士0.05 mm | |
| Max.motion range | Axis 1 | 士180° |
| Axis 2 | +90°/-30° | |
| Axis 3 | +51°/-90° | |
| Axis 4 | 士360° | |
| Axis 5 | ------ | |
| Axis 6 | ------ | |
| Max. speed | Axis 1 | 148°/sec |
| Axis 2 | 148°/sec | |
| Axis 3 | 150°/sec | |
| Axis 4 | 360°/sec | |
| Axis 5 | ------ | |
| Axis 6 | ------ | |
| Weight | ≈230 kg | |
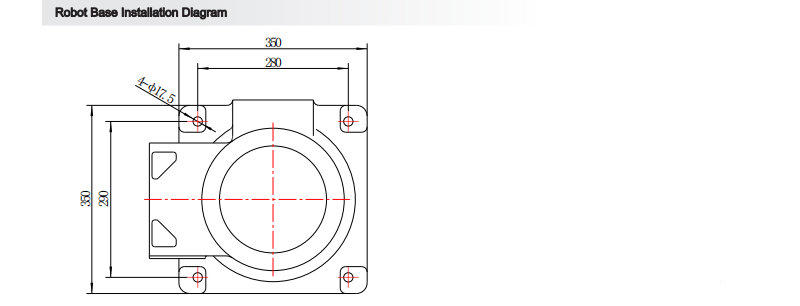
| Mounting type | Ground, bracket, ceiling | |
| Ambient temperature | -20 °C~80°C | |
Zhejiang Qiyue Mechanical Technology Co., Ltd. as a Custom Hot sale handling robot arm YB1850-20-4A Suppliers is your complete source for gear reducers, actuator,rotary table, robot arm, and other innovative products used in automation technology.With one of the largest product offerings in the motion control industry as well as the engineering expertise and manufacturing capabilities to provide customized solutions, Arcsec Drive can help with your application.Being flexible to meet the needs of customer requests and great service are what set Arcsec Drive apart from the rest.

Item No.: ADF-I-14-100 Installation easyCompact and simple design Outer diameter:75mmWeight:0.58KgMa...
More
Selling Units: Single itemSingle package size: 29X21X13 cmPackage Type: One Set of Harmonic Drive in...
More
Item No.: ADHD-14/17/20-III Brand Name: Arcsec Drive Place of Origin: zhejiang, China ADHD series' f...
More
Item number: ADH-I-14-100 Outer diameter:70mmWeight:0.39KgMax.Torque: 62.1NmRated Torque: 9NmOptiona...
More
Item No.: ADH-14/17/20/25/32/40-III hollow shaft harmonic drive popular used on CNC machine, industr...
More
Item No.: ADH-14/17/20/25/32-IV ADH-IV:A combination product with shaft, which is easy to operateADH...
More
Size:14,17,20,25,32 Item No.: ADH-14/17/20/25/32-VADH-V:A simple combination product, the shaft size...
More
Item No.: ADSD-14/17-I Brand Name:Arcsec DriveMaterial: Iron, Stainless steelPlace of Origin:zhejian...
More
Item number: ADS-I-14-100 Outer diameter:73mm Weight:0.51Kg Max.Torque: 62.1Nm Rated Torqu...
More
Color: SilverType:RV SeriesPlace of Origin:zhejiang, ChinaBrand Name:Arcsec DriveApplicable Industri...
More
Item No.: PL01 planetary reducer used on robot arm cnc machine rotary table Output Torque: 48-160Inp...
More
Item No.: PLF01 Place of Origin: Zhejiang, ChinaBrand Name: Arcsec Drive Net Weight: 7.4 KG-9.8KGNo...
More
Copyright © Zhejiang Qiyue Mechanical Technology Co., ltd. Rights Reserved.
 Custom Hot sale handling robot arm YB1850-20-4A Suppliers
Custom Hot sale handling robot arm YB1850-20-4A Suppliers